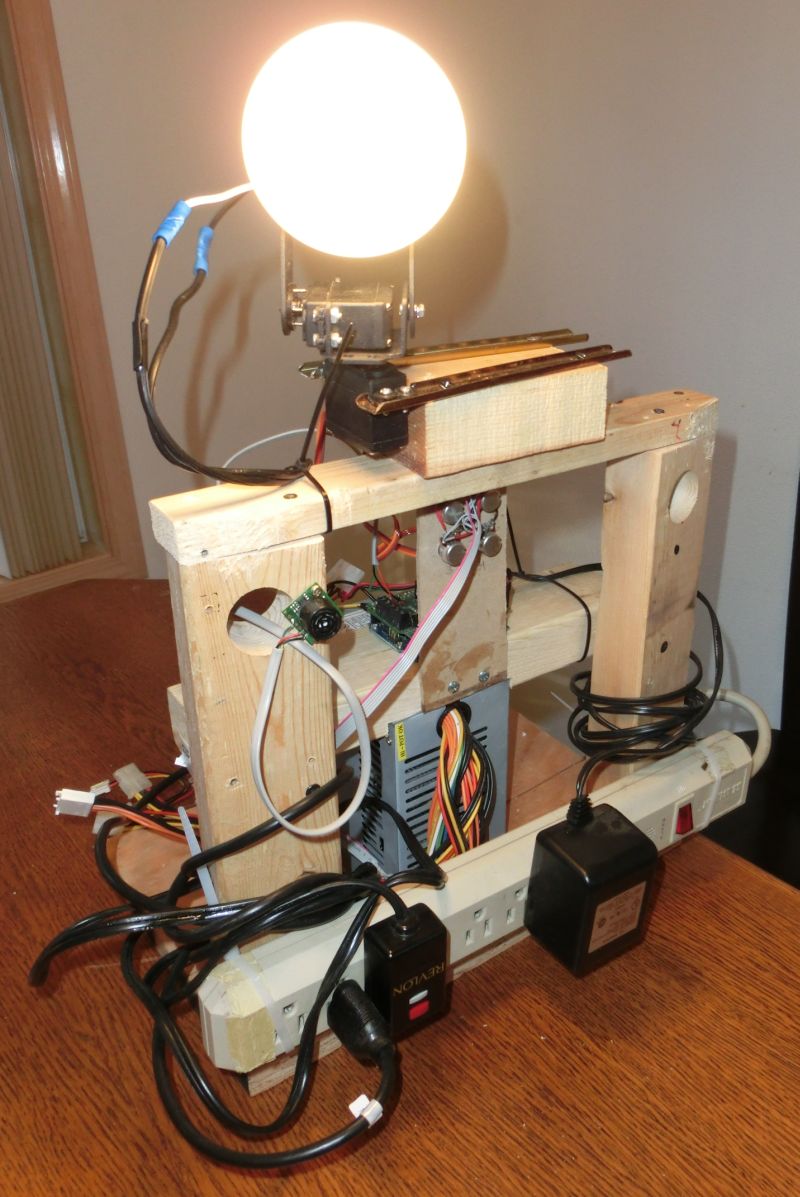
Here it is!

First of all, why Cyclopes?
Well, I purchased 2 pan and tilt assemblies on ebay from China, but got only one so far. I’m working on it.
However, it is kind of too late. Cyclopes are cool too.
It should work with light on. sadly, camera cannot handle it, and picture become over-saturated. However, in a real life it looks cool!
I purchased Adafruit servo shield (16 channels) because I thought I will need 4 channels, and my motor shields provide only 2.
Somehow, half way this shield stopped communicating with Arduino. I cannot figure out why. When shield is ON, firmware freezes occasionally, and the whole thing is unusable.
I have a bin with fried circuits. I found there my antique Adafruit motor shield version 1 (I also have version 2, I fried them both. No, I’m mot an idiot, well, at least not that much of an idiot, it just creepy specification sheet from one stepper motor).
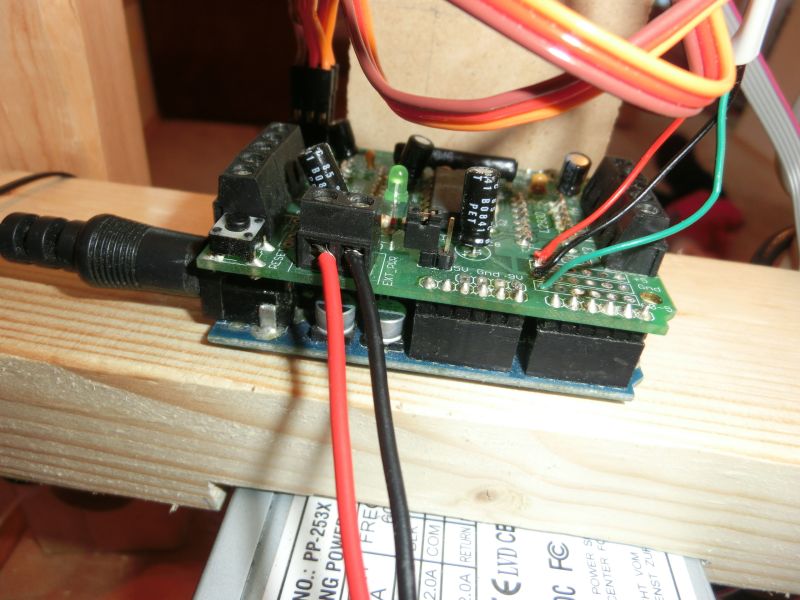
Anyways, all I needed from the shield was servo pins. I cut off fried microchips (for just in case – I do not need fire) and used the rest. Fortunately, this shield used old reliable technology – Arduino PWM pins 9 and 10. I had to re-write the firmware, but that was easy.
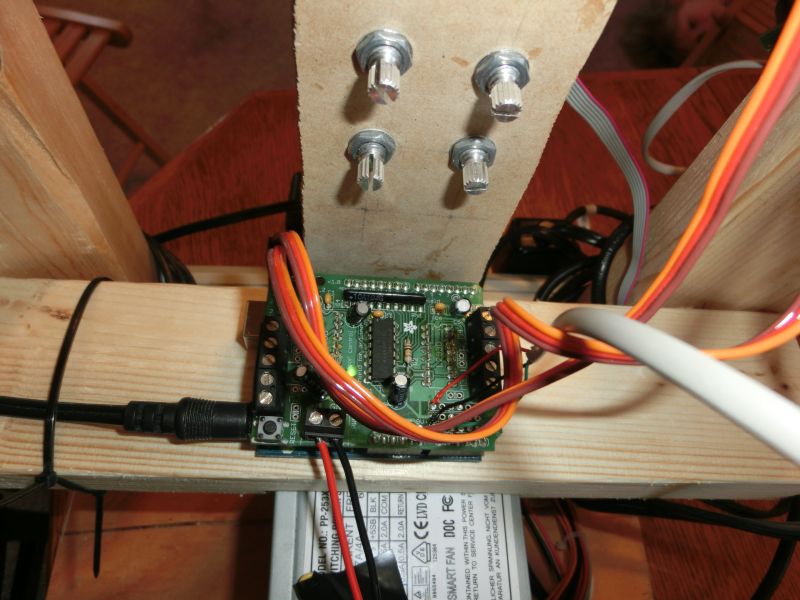
Can you see leftovers from motor driver chips?
My cyclopes uses ultrasonic distance sensor. When nobody is around it occasionally moves randomly with random speed – looks creepy even to me (considering that I wrote the algorithm).
When somebody come close, it looks straight forward, and occasionally glance left and right.
I really need a camera and patterns recognition to follow people with the eye. Well, maybe next year.
??????, ????? ? ???!
?????? ????????? ??????????, ???? ?? ??? ?????? ????????????!
??? ???????! 🙂 ?????, ?? ????????? ? ???????? ??????????? ? ?????????????
??? ??? ?????? ?????, ?????????? ?? ????????
Hi Kostya, Hi Olya!
Ok, Russian is not accepted 🙂
This is always interesting to track you inventions and home-projects!
Keep doing! 🙂 Konstantin, are you dealing with stepper motors and controllers at your work or is it just hobby and good memory of Uni-times? 🙂